Traffic Impacts

Traffic Flows, Congestion and Vehicle Miles Traveled
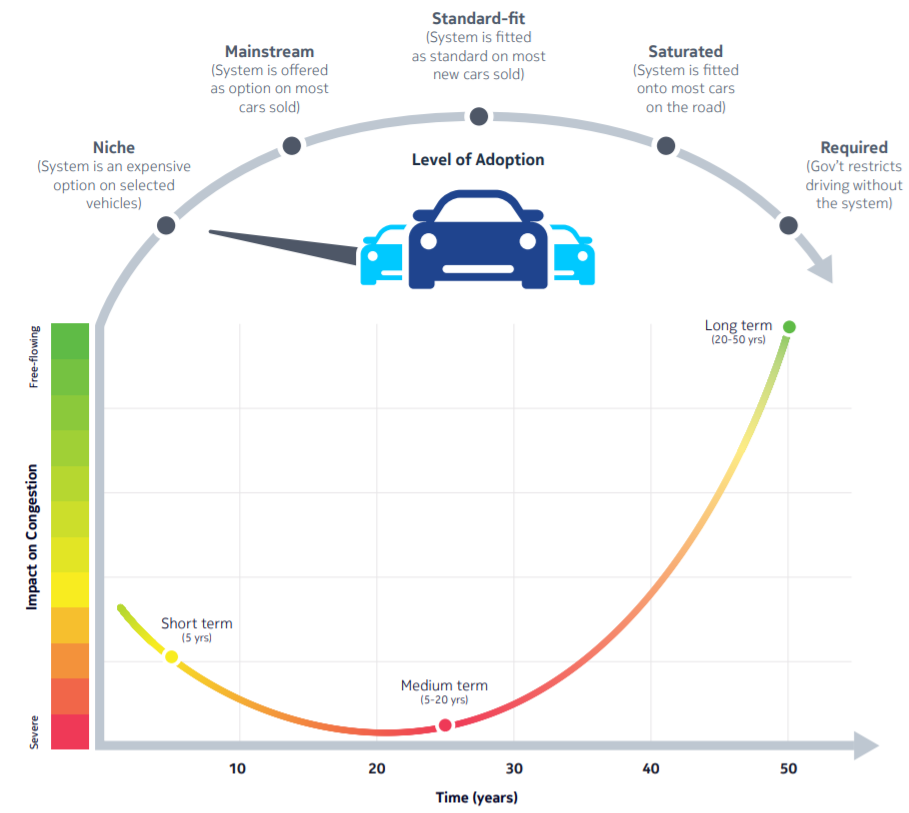
One of the goals of fully automated vehicle (AV) technology is to improve current traffic conditions. Traffic congestion wastes fuel, increases commuters’ time, and adds to CO2 emissions. While AVs are expected to eventually improve congestion, there will likely be a transition period during which vehicle miles traveled (VMT) will sharply increase, and congestion will be at a high. According to a report from HERE Technologies on congestion impacts due to AVs, “basic levels of autonomy can have a small positive impact in helping to ease traffic congestion, but high levels of autonomy can have a detrimental effect on congestion when their penetration rate is low. For this reason, the early days of highly automated vehicles could present risks to society’s efforts to combat congestion,” (HERE, 2016, p. 8). This concept is illustrated in the graphic below.
 Source: HERE, 2016Short Term (5 years)
Source: HERE, 2016Short Term (5 years)
During the short-term adoption period, with low levels of autonomy, there will be temporary improvements in traffic conditions due to Advanced Driver Assistance Systems (ADAS). These technologies, such as adaptive cruise control, automatic emergency braking and lane departure warning, reduce human error on the road, thus decreasing congestion.
Medium Term (5-20 years)
In the medium term period, with the introduction of level 4 autonomy, it is predicted that congestion will be at its worst for a number of reasons.
Driver Adaptation – There will be a transition period during which drivers are becoming accustomed to the new technology. Issues related to this include the following.
- New vehicle types → more accidents
- Reliance on autonomous mode and lack of driver intervention → bigger accidents
- Lower comfort level with new technology → slower flow
Changes in Travel Behavior – As AVs become more mainstream, we will encounter another set of potential problems due to an increase in convenience. First, long-distance travel will likely increase, leading to more VMT and larger vehicles. Driver drop off and one-way trips could lead to empty driving and increased VMT. Also, increased mobility equates to more vehicles on the road.
New policies and roadway management may influence the following.
- Easier car-sharing → drop in vehicle ownership
- Managed lanes to increase freeway capacity → increased congestion on arterial roads (Levin et al., 2018)
- Setting up dedicated ‘Autonomous Lanes’ → preventing negative interactions with traditional cars and also attracting a market
All of the factors above compound to reduce overall traffic conditions, making the medium term adoption period the least predictable and the most problematic, if policy measures are not taken.
Long Term (20-50 years)
In the long term, the traffic condition improvements sought through the development of AVs could eventually be met. This will likely occur when regulation prevents people from owning their private vehicles and requires the use of self-driving mode. “At that stage, central management of all vehicle movements will become feasible, and alongside the elimination of traffic accidents, congestion will become a distant memory,” (HERE, 2016, p. 11). Efforts to avoid congestion should seek to take full advantage of AVs potential improvements in capacity. Also, central management may take time to tackle liability or freedom issues. Further, central management for large urban area requires high computationally effective simulators in operation. These conditions will take many years to be fulfilled and will require an effective use of government regulation and policy.
Potential Traffic Benefits
Traffic Waves Reduction
Traffic from human motorized vehicles does not flow smoothly, particularly at high density. When the volume exceeds a certain density, we can notice traffic waves. The instabilities related to traffic flow increase as density increases, “small perturbations amplify and grow into stop-and-go waves that travel backward along the road,” (Stern et al., 2017, p. 1). These traffic waves can be demonstrated in the following video.
Removing as many human drivers as possible will help to reduce these traffic waves, but according to a study performed by Daniel Work, assistant professor at the University of Illinois at Urbana-Champaign and a lead researcher in the study, “experiments show that with as few as 5 percent of vehicles being automated and carefully controlled, we can eliminate stop-and-go waves caused by human driving behavior,” (Walter, 2017). As driverless vehicles with connectivity become more widespread, traffic conditions may begin to improve.
However, if these automated vehicles are driven autonomously (without connectivity), they will make traffic waves worse than they are now, but if the vehicles are driven cooperatively (using cooperative adaptive cruise control) they can reduce or eliminate the traffic shock waves. This has been demonstrated in a study by Milanés et al. (2014).
Increase in Lane Capacity
Increases in lane capacity has similar implications to the traffic shock waves described above. Automation allows for an increase in lane capacity because extra space will no longer be needed to account for human error, like distraction and drifting. According to CTR’s report on modifying transportation design, “technical competence and rising confidence in CAV response times can lead to shorter following distances and headways between vehicles,” (Kockelman et al., 2017, p. 9). Through connectivity, AVs will be equipped to respond to changes in traffic conditions in a more effective way than humans are capable of. If the automated vehicles are not connected they will reduce lane capacity, but if they are connected they can significantly increase lane capacity (see California Partners for Advanced Transportation Technology (PATH) at UC Berkeley).
Autonomous Intersection Management (AIM)
At the University of Texas at Austin, research pertaining to optimization of intersection operations depending on what portion of the traffic stream is autonomous is ongoing (Au, 2018). The AIM system involves V2I communication between AVs and an intersection manager. The intersection manager divides the intersection region into a grid of tiles (divided by space and time) and then specifies the turning movements of AVs at the intersection (according to a priority function) based on conflicts found with the tiles. This allows for the simultaneous movement of traditionally restricted vehicle movements, thereby increasing the throughput of the intersection. As demonstrated by the following video, delay at these intersections decreases dramatically as the proportion of automated to non-automated vehicles increases.
However, AIM provides little or no improvement over today’s traffic signals when less than 90% of the vehicles are fully automated, thus restricting its contributions to the transition phases for AVs (Sharon and Stone, 2017, p.1).
Challenge
People may worry about the safety implications for the real world, as it requires the elimination of all pedestrian and bicyclist usage of the intersection and it assumes perfection of the automated vehicle behaviors and complete predictability of the behaviors of the human drivers. However, AVs do provide potential changes to the urban transportation infrastructure design (see transportation infrastructure impacts) and people may expect a long way to achieve AIM via mature technology in the future.
Schaller Consulting (2018) released a report about Transportation Network Companies (TNCs) deploying CAVs. TNCs have surpassed US local bus ridership, since they offer extra convenience and flexibility. Without regularly restrictions on use (such as extensive tolling), the Schaller report anticipates more traffic, more car dependence, less transit use, lowered transport equity, and environmental degradation. They recommend that policymakers steer AV development away from that style of future starting today, with steps to manage TNCs and personal auto (and truck) use, ideally emphasizing frequent, reliable, comfortable and high-capacity transit service.