Safety Impacts of Connected and Fully Automated Vehicles

In the US in 2016, 37,461 people were killed in motor vehicle crashes (NHTSA, 2016). 94 percent of these serious crashes can be attributed to human error, which could be greatly reduced if a fully automated fleet is eventually put in place (NHTSA, 2016). Because of this enormous potential to save lives, safety will likely be one of the most important benefits to consider with regard to CAVs. Meanwhile, we would also need to pay attention to the challenges to CAV safety issues, outlined in the Criticisms of AV Ethics and Decision-Making section of the potential challenges page.
Connected technology is likely to provide essential communication among vehicles, while automation technology may substantially increase safety through automatic identification and judgment. Specifically, automation technology could help increase safety as a result of the following benefits (Bhat and Pendyala, 2013).
- Virtual elimination of driver error
- Enhanced vehicle control, positioning, spacing, and speed harmonization
- Offsetting behavior on part of drivers
- No drowsy drivers, impaired drivers, stressed drivers, or aggressive drivers
- Reduced number of incidents and network disruptions
Safety Elements
Below is a representation of interconnected tasks of systems that would work together to make driving decisions in CAVs.
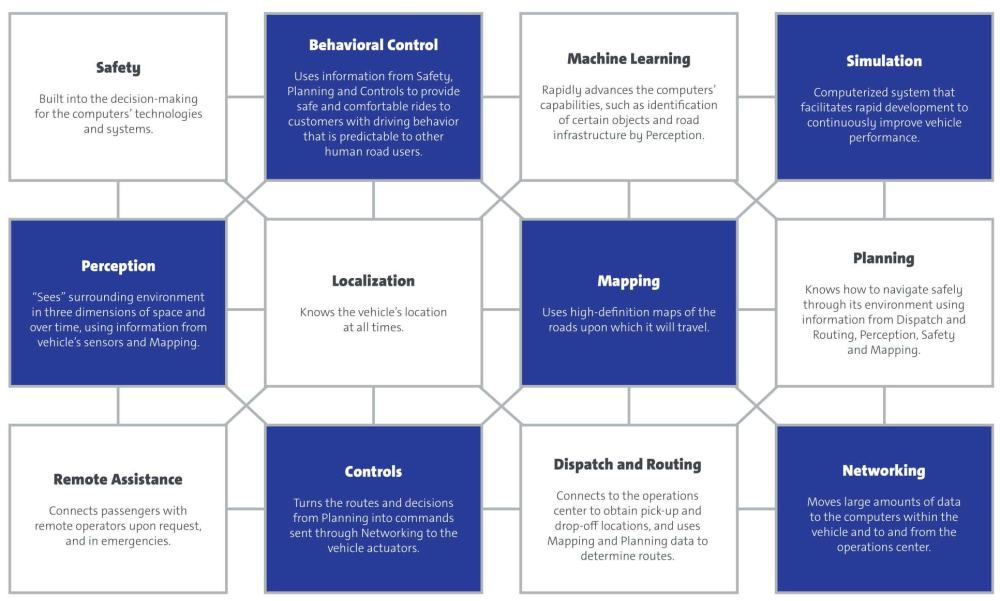
All of these features would work together in a CAV, serving as the brain of the vehicles. Due to their inherent connectivity, CAVs have the potential to make decisions that are in the best interest of safety.
The NHTSA’s enforcement authority concerning safety-related defects in motor vehicles and motor vehicle equipment extends and applies equally to current and emerging automated driving systems. The NHTSA outlines 12 safety elements for ADS, listed below (NHTSA, 2017).
- System safety
- Operational design domain
- Object and event detection and response
- Fallback (Minimal Risk Condition)
- Validation methods
- Human-machine interface
- Vehicle cybersecurity
- Crash-worthiness
- Post-crash behavior
- Data recording
- Consumer education and training
- Federal, state, and local laws
Automakers are urged to consider all 12 safety elements of ADS when developing these systems.
Cost Savings
Vehicle crashes are associated with significant costs, attributed to the cost of the traffic disruption, the cost of emergency personnel and equipment, the cost of vehicle and infrastructure damage, and more. Decreasing the number of crashes may greatly decrease these expenses. One study from the Center for Transportation Research at the University of Texas at Austin found that “about 75% of total (police reported) collision costs could be saved if vehicles were made fully automated and connected,” (Li and Kockelman, 2016, p. 190). By limiting the frequency and severity of crashes, collision expenses could be drastically reduced.
Using an available crash database, Li and Kockelman found that at a market penetration of 90%, “advanced CAV technologies may reduce current US crash costs at least by $126 billion per year,” (Li ad Kockelman, 2016, pg. 17). These savings are mainly due to safety increases from technologies like Forward Collision Warning in combination with Cooperative Adaptive Cruise Control.
Adoption
The exact safety benefits of AVs are difficult to predict because there are no data and very few AVs to work with for studies. However, through simulations in a study from the University of Texas at Austin, “it was observed that the number of crashes and their severity decreases as the share of AVs in the traffic stream rises,” (Kockelman, et al., 2016, p. 210). While we would see some safety benefits from automation technology in the near future, full benefits will be likely to occur when all vehicles on the road are automated.
Challenge
An Uber self-driving test car, with an operator at the steering wheel, killed a pedestrian in dark clothing at night on March 18, 2018, on an unlighted section of a Tempe, Arizona roadway with a 45-mph speed limit. This Volvo vehicle was equipped with an automated driving system, consisting of forward- and side-facing cameras, radars, light detection and ranging equipment, navigation sensors and a computing and data storage unit integrated into the vehicle (NTSB, 2018). The original vehicle’s collision avoidance functions, including automatic emergency braking and the ability to detect driver alertness and road sign information, had been disabled for the test ride.
The following figure illustrates what happened 1.3 seconds before the impact, when “the system determined emergency braking was needed to mitigate a collision. The yellow bands depict meters ahead of the vehicle, the orange lines show the center of mapped travel lanes, the purple area shows the path of the vehicle and the green line depicts the center of that path.” (NTSB, 2018)
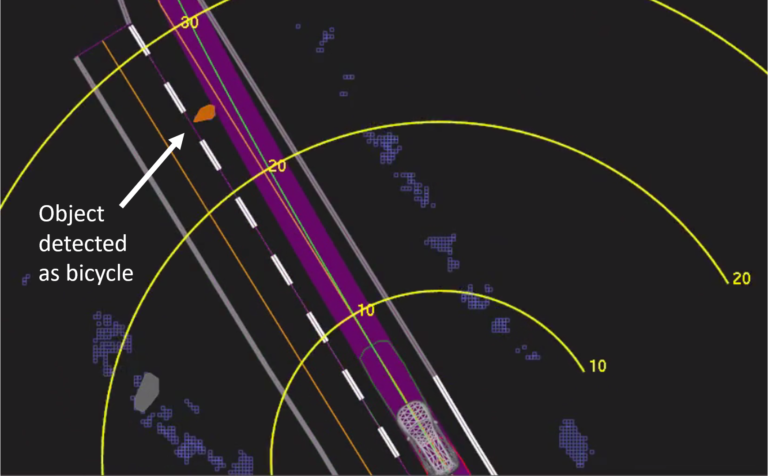
Source: NTSB, 2018
All aspects of the crash remain under investigation as the NTSB determines the probable cause, with the intent of issuing safety recommendations to prevent similar crashes. However, this crash may demonstrate thetemptation for companies to rush to testing and to market. A lack of clear and sufficient federal regulations around testing and deployment remains (Bliss, 2018). AVs come with a promise to save lives by reducing human error and improve safety, but concerns about cybersecurity, sensor malfunctions, imperfect programming, and “corner” (i.e., rare or extreme) crash cases remain.